| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 | 31 |
- 머신 러닝 초급
- autonomous driving
- Azure Kinect
- KalmanFilter
- RTK
- ROS
- Visual-Inertial SLAM
- 다가오는 말들
- 모두의 딥러닝
- ORB-SLAM3
- 원격 접속
- SDV
- 자율주행 센서
- ExtendedKalmanFilter
- 20500
- 라이다
- GPS
- Open3d
- 3D reconstruction
- Visual SLAM
- 갱파카
- StatePrediction
- RTCM
- VINS_MONO
- 자율주행
- NTRIP
- Odometer
- clearPath
- 환경 구축
- Slam
- Today
- Total
알파카농장
[Introduction to Self-Driving Vehicle Technology] 자율주행 자동차의 하드웨어: 센서 구성 본문
[Introduction to Self-Driving Vehicle Technology] 자율주행 자동차의 하드웨어: 센서 구성
갱파카 2022. 1. 3. 16:19오랜만이죠?
블로그를 부지런하게 작성했었어야 했는데... 너무 무심했던 나..
이제 2년 동안 자율주행과 연구/개발 일지에 대해 꾸준히 블로그를 작성해보려고해요.. ^^
2022년의 첫 단추는 자율주행 자동차의 구성에 대한 글입니다!
* 해당 블로그의 내용은 "Introduction to Self-Driving Vehicle Techonology (자율주행차량 기술 입문) -
행키 샤프리 지음, 김은도 * 남기혁 * 서영빈 * 이승열 옮김"의 내용을 기반으로 작성된 포스트입니다.
SDV ? Self-Driving Vehicle : 자율 주행 자동차
< SDV 개발자가 하는 일 >
1. 기능, 비용, 자동차 설계를 비롯한 여러 요인을 고려하여 센서에 대한 최적 설계
2. 수집한 데이터를 처리해서 주어진 목적을 달성하는 데 있어 최적의 결정을 내릴 수 있는
SDV 알고리즘을 비롯한 여러 도구를 구현
3. 원하는 동작을 수행하도록 자동차 플랫폼에게 명령 내리기
센서 설정은 단순히 기능만의 문제는 아님! ->
"비용"도 고려해야 하고, 센서의 위치가 "차량 디자인을 해치는지"에 대한 고려도 필요
LiDAR와 같은 센서는 여전히 비싸서, 저사양 차량에는 적합하지 않고,
비용이 충분하지 않다면 당장 사용 가능한 다른 센서를 좀 더 지능적으로 활용해
장착하지 못한 센서의 역할을 보완하는 방법이 있음
=> 어떤 종류의 센서를 선정하든, 자동차에서 컴퓨팅 파워를 충분히 제공함으로써 모든 센서로부터의 데이터를
동시에 수집하여 처리할 수 있게 만들어야 함
그렇다면 우선 자율주행 자동차에 달려 있는 센서는 어떤 것들이 있을까?
1. RADAR (RAdio Detection And Ranging)
: 적외선보다 파장이 긴 전자기파를 이용해 물체를 탐지하고 추적하는 센서
도요타가 1980년대 후반 자동차에 레이더를 장착하는 방식을 개척했고, 그 뒤로
ACC (Adaptive Cruise Control), ADAS (Advanced Driver Assistance System)에 널리 사용되고 있는 센서
레이더는 반향을 이용해서 전파를 쏘면 주변 물체에 부딪혀 반사 →
물체가 있는 방향과 물체까지의 거리, 물체의 크기 정보를 얻게 됨
그 중 도플러 레이더는 파동의 위상을 분석하여 Positive Shift (가까이 다가옴), Negative Shift (멀어짐) 정보를 통해
물체의 상대적인 위치, 속도 등을 알 수 있음
2. LiDAR (Light Detection And Ranging)
: 반사된 송출 에너지를 분석하여 개체의 위치와 거리를 측정
레이더는 전파를 이용, 라이다는 펄스 레이저 광원을 이용

해상도가 높고 비금속 개체도 탐지하는 등 고유한 특성 덕분에 라이다는 3D 지도 제작에 흔히 사용됨
-> 정확한 Localization과 Navigation을 위한 고해상도 지도에 의존하는 SDV에 적합
- 라이다 센서는 초당 수십만 펄스 수준의 아주 빠른 속도로 광원을 쏨 한 번 스캔에
여러 수직 펄스(Channel)을 송출해 개체의 높이도 측정하는 기능 제공
→ 노이즈 필터링이나 개체 인식과 같은 특정한 인지 알고리즘에 유용하게 사용 - 라이다는 빔폭이 좁고 다소 먼 거리까지 도달해서 고해상도 3D 매핑에 적합한 센서로 자리 잡음 실내 측위와 같이, 위성 기반 GNSS를 사용할 수 없는 영역에서 중요한 역할
- 가격이 매우 높아서 양산 차에 널리 보급하기에는 큰 장벽이 되고 있음
- 레이저 빔은 안개나 먼지 등과 같은 작은 입자에도 반사하기 때문에 환경에 상당히 미감하고.
레이더에 비해 노이즈가 많이 생성됨

3. 초음파 센서 (Ultrasonic)
: 사람이 들을 수 있는 범위를 벗어난 음파 (주파수가 20kHz 이상인 음파)
요즘 차량에 달린 초음파 센서는 단순 주차 보조 기능만 수행하는 게 아니라,
헤드 유닛이나 인포 시스템을 직접 터치하지 않고 제스처를 인식하여 음악을 선택하거나 재생 동작을 조절하는 기능
구현하는 HMI (Human Machine Interface) 활용
- 초음파 센서는 라이다, 레이더와 마찬가지로 ToF(Time-of-Flight) 센서로 분류
→ 송출한 파속이 되돌아오는데 걸리는 시간 계산 - 센서는 기본적으로 교류(AC) 전압 → 초음파 : 송출기 (transmitter) 힘을 받으면 AC 전압을 생성 : 수신기 (receiver)
- 음파는 개도각이 커서 중첩된 신호의 삼변측량 이용
4. Camera
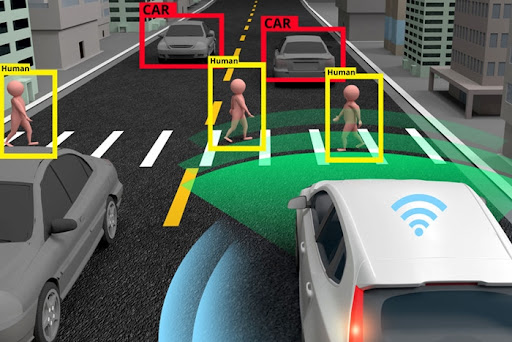
- 카메라는 라이다, 레이더, 초음파 센서와 달리 패시브 센서 광파를 수동적으로 받을 뿐,
어떠한 형태의 에너지도 능동적으로 송출하지 않음 - 광학 장치, 이미지 센서, 이미지 프로세서로 구성
- 다른 센서들과 비교했을 때, 컬러와 같은 더 광범위한 주파수 대역을 수집
- 차선 감지, 교통 신호 인식과 같이 장면에 대해 훨씬 더 다양한 정보를 파악할 수 있음
- 카메라 기반 Localization의 결과가 LiDAR 기반 Localization의 결과보다 훨씬 뛰어날 때도 있음 →
구조보다는 텍스처를 이용해서 빌딩과 같은 랜드마크 구분하는 상황 - 카메라는 레이더나 라이다에 비해 가격이 저렴함 그러나 주변 환경에 매우 예민
- Vision 센서를 통해 취득한 이미지는 CNN 기반 딥러닝 학습을 통한 모델링
5. GNSS (Global Navigation Satellite System) : 위성 항법 시스템
- 전 세계를 대상으로 하기 때문에 SDV 개발에 관련된 주요 혁신을 먼저 이룸
- 자동차는 디지털 지도와 온보드 컴퓨터를 함께 이용해서 지도상의 현재 위치를 파악하고,
원하는 목적지까지 가는 경로 계산 - GNSS는 하늘 위의 여러 궤도에서 돌고 있는 위성을 기반으로 작동 GPS의 경우,
최소 24개의 위성이 연속적으로 신호를 주고받아야 전 세계를 대상으로 위치를 찾을 수 있음 - GPS 수신기가 세 개 이상의 위성으로부터 신호를 받아야 지상의 위치를 결정할 수 있음 → GPS 수신기에 원자 시계가 장착되어 있는 경우에는 3개의 위성만 있어도 된다. 하지만, 대다수의 GPS 수신기는 그보다 단순한 시계를 장착하고 있끼 때문에 시간 오차를 어느 정도 만회하려면 최소한 4개 이상의 위성으로부터 신호를 받아야 함
- 삼변 측량으로 수신기의 위치를 결정
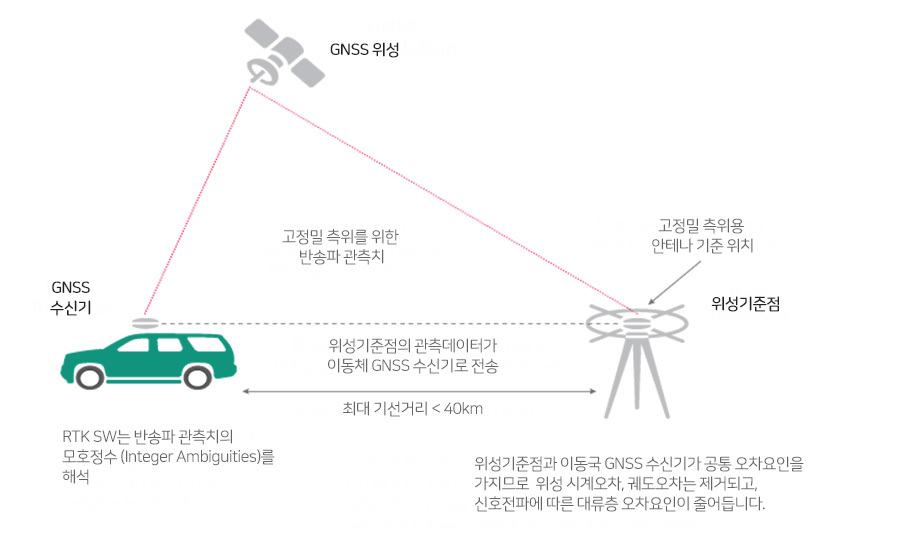
- GNSS는 절대 위치 사용 : 오차가 누적되지 않는다는 장점. 그러나 수신기와 위성 사이에 장애물이 없어야만 제대로 작동함 → 복잡한 도심에서는 GNSS 신호가 여러 경로를 거치며 지연되는 현상이 발생하고 성능이 떨어질 수도 있음
- DGPS(Differential GPS)나 RTK GPS(Real-Time Kinematic)와 같은 기술을 사용하면 1-2cm 정도로 성능을 높일 수 있지만 공용 GPS는 3m 정도밖에 안됨. 그러나 DGPS와 RTK GPS의 경우 전용 기지국이 고정된 위치에 있어야 하므로 특정 영역에서만 적용할 수 있다는 단점이 존재
6. IMU
7. Odometry
=> 이 7가지의 센서가 SDV의 눈과 귀에 해당하는, 주변 환경을 감지하는 기술!
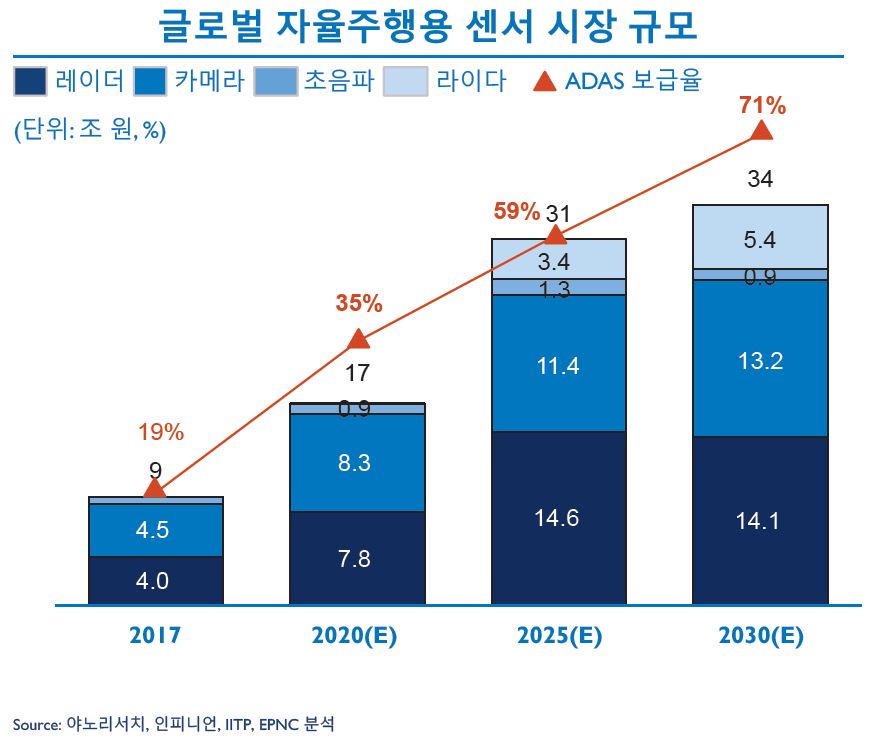
Radar와 Camera 센서가 시장 대부분의 파이를 먹고 있지만, LiDAR도 엄청난 속도로 성장하고 있는 점.
눈여겨 봐도 좋을 것 같다.
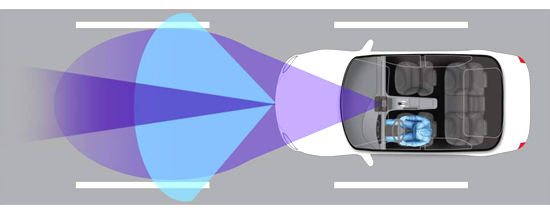
위의 내용은 자율주행 차에 달리는 다양한 센서에 대한 설명이었다면,
자동차의 눈과 귀로부터 온 정보는 두뇌를 통해 필터링이 될 필요가 있다. 그 기술이
"컴퓨팅 플랫폼" : 센서로부터 수집한 모든 데이터를 분석하여 실시간으로 정보를 가공함으로써
주변 환경에 대한 뷰를 생성하는 기술이다.
컴퓨팅 플랫폼이 자동차 주변의 현재 상황을 파악하면, 의사 결정을 하고 필요한 동작을 수행하도록
액추에이터 인터페이스에게 명령을 내린다. "감지 - 결정 - 실행"
자동차 주변에 대한 3D 이미지를 견고하면서 정확도가 높게끔 생성하는 능력은 자율주행에서 핵심 !
이를 위해서는 고성능 (HPC : High-Performance Computer) 수준의 컴퓨팅 파워는 필수 !!
1. 데이터 속도
SDV 센서는 방대한 데이터를 생성하고, 컴퓨팅 플랫폼을 이를 실시간으로 처리할 수 있어야 함
자동차에 장착된 카메라, 라이다, 레이더를 비롯한 센서의 개수에 따라 데이터 전송 속도는
최대 1Gbps에 이를 수 있기 때문에,,,, 유튜브 HD급 영상에 필요한 속도의 1,000배 정도!
2. 컴퓨팅 파워
컴퓨팅 플랫폼은 방대한 데이터를 실시간으로 처리할 뿐만 아니라, 모든 상황마다 올바른 결정을 내릴 수
있도록 충분해야 함. Emergency Brake 같은 경우 잠깐만 늦어지더라도 발생할 수 있는 문제가 너무 많으므로,,,
3. 에너지 소비
4. 견고성 (PC의)
마지막으로 센서가 SDV의 눈, 귀고, 컴퓨팅 플랫폼이 SDV의 두뇌와 같다면,
차량 내부 네트워크는 중추 신경계에 해당한다고 한다. 여기서는...
1. CAN(Controller Area Network) : 차량용 네트워크 버스 아키텍처
여러 ECU(Electronic Control Unit)끼리 안정적으로 메시지를 주고받을 수 있도록 하는 네트워크
-> CAN 메시지마다 식별자와 최대 8바이트 데이터, 기타 정보로 구성됨
2. 이더넷 (Ethernet)
기존 차량용 네트워크에 비해 훨씬 많은 양의 데이터 페이로드를 더 빠른 속도로 전송 가능
효율적인 대역폭 사용 가능
여기까지가 일반 차량을 SDV로 만들기 위한 하드웨어 구성에 대한 내용이다!
다음에는 인지 기술과 아키텍처 등에 대한 내용을 가져오도록 하겠습니다.
'Computer Science' 카테고리의 다른 글
| [모두의 딥러닝] Ubuntu 환경에 GPU, Anaconda 환경 구축 (0) | 2022.01.10 |
|---|---|
| [Localization] RTK, NTRIP에 대한 설명 (2) | 2021.05.23 |
| [GIT] git pull로 repository에서 가져오기 (0) | 2021.05.10 |
| [자율 주행 분야로의 진로 준비] (0) | 2021.05.03 |
| [20500] Ezreal 여눈부터 가네 ㅈㅈ (0) | 2021.01.31 |



